기억이 가물가물한데, 적도의를 만들기 위해 무작정 하모닉 드라이브를 구입한 것이 2016년 하반기 아님 2017년 초이다.
하모닉 드라이브의 종류도 모르고 덥석 산것이 알고보니 SHD 타입이었다.
적도의를 만들기 위해서는 CSF 타입을 구입하는 것이 부품 가공 측면에서는 쉽다.
하모닉 드라이브의 종류를 알고 싶으면 아래 링크를 클릭해 보자.
http://www.boopoom.com/shop/list.php?ca_id=010505
하모닉 드라이브는 공장 자동화 설비 등의 로봇 팔에 사용되는데, 일정시간 사용하고 나서 유격이 생기면 교체한다고 한다. 우리는 이렇게 교체되는 하모닉 드라이브를 중고로 구입하여 적도의 제작에 이용한다.
업체에서 판매되는 하모닉 적도의 중에 중고 하모닉 드라이브를 사용했다고 알려진 제품도 있다. 최근에 업체에서 판매되는 하모닉 적도의에 어떤 하모닉 드라이브가 사용되는지는 업체에서 정확한 정보를 주기 전에는 알기 어렵다.
최근에는 특허가 풀려서 국산이나 중국산 하모닉 드라이브가 판매되고 있다.
하모닉 드라이브 신품은 워낙 가격이 비싸서 접근하기 어렵지만 중고품은 가격은 크기와 상태에 따라 10만원~40만원 정도에 구입이 가능하다.
아래 사진은 내가 구입한 20번 1/50 SHD 타입의 하모닉 드라이브이다.
이번 적도의 제작에 사용한 하모닉 드라이브 사양은 다음과 같다.
적경축 : SHD 타입, 25번 하모닉 1/80
적위축 : SHD 타입, 20번 하모닉 1/50
적경축, 적위축 같은 감속비를 사용하면 더 좋은데, SHD 타입 20번 1/80 제품은 구하기가 쉽지 않다.


금속 가공은 업체에 맡겨야 하지만, Fusion 360으로 모델링 한 후 3D 프린터로 출력하면 부품을 조립해보는데는 충분하다. 큐비콘을 빌려다가 모델링한 후 집에서 마구 출력하여 이리저리 조립을 해 보았다.
처음에는 사각기둥 형태로 모델링했다가, 두번째는 원기둥 형태로 모델링했다가, 다시 사각기둥 모양으로 모델링하였다. 이렇게 저렇게 시행착오를 반복하며 부품들을 출력하였다.
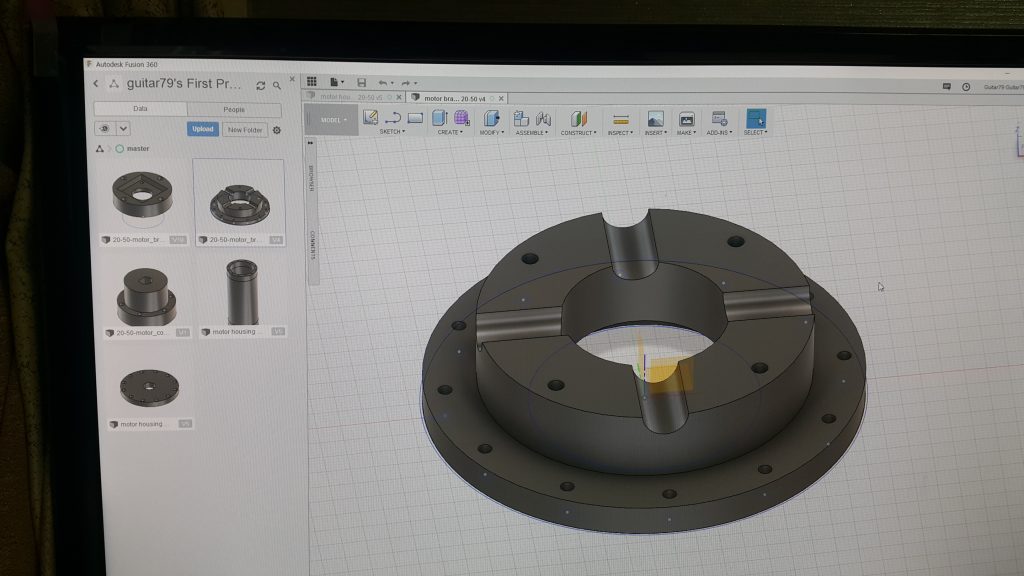



아래는 3D 프린터로 모터 결합 부분만 출력하여 조립해본 모습이다.



하지만 금속으로 가공하는 것은 또다른 문제라서 결국 가공은 이 분야 전문가에게 맡기기로 했다. 필라맨트를 쌓아 올리는 3D printing과 금속을 깎아 들어가는 머시닝 센터 가공은 다르기에 설계부터 다시 해야 한다.
사실 하모닉 적도의는 하모닉 드라이브, 모터, 컨트롤러 이렇게 세가지가 조화를 이루어 동작하게 되는데, 처음에는 이런 개념도 모르고 제작을 시작하였다. 이 부분에 대해서는 아래 쪽에 다시 설명할 예정이다.
아래 사진이 완성된 적도의의 모습이다. 이제 폴 마스타가 있으니 극축망원경은 필요 없게 되었다. 제작자께서 폴 마스타 어뎁터까지 센스 있게 달아 주셨다.
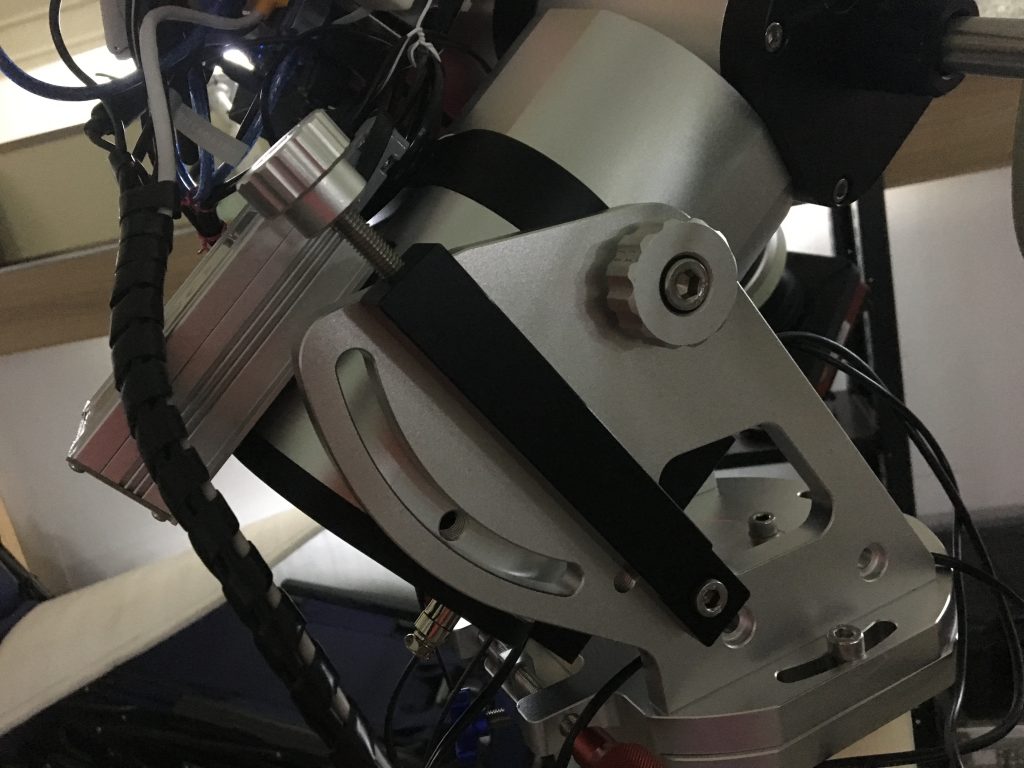
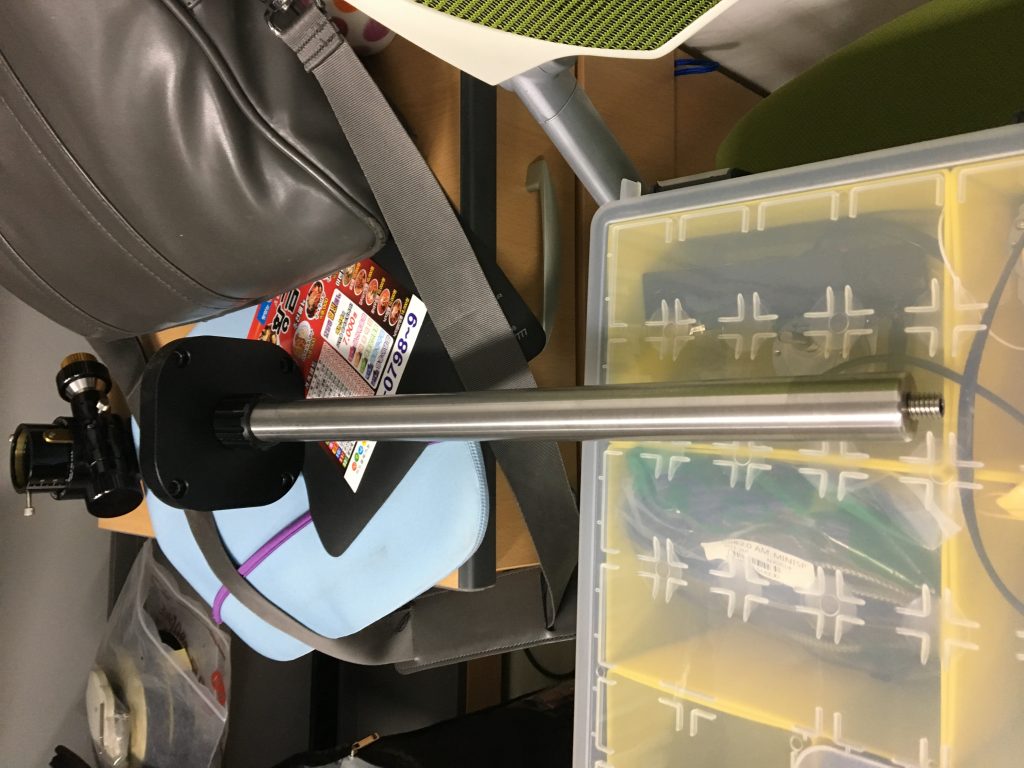
아래 사진은 극축을 맞추기 위한 방위각과 고도 조절 부분의 모습이다.
최근 일본과의 무역 마찰을 일으키고는 있지만, 하모닉 드라이브, 모터 모두 일본산 제품이 성능이 더 좋다. 우리나라가 일본의 기술을 따라가지 못하는 부분이 상당히 많아 앞으로 더욱 노력해야 하는 부분이다.
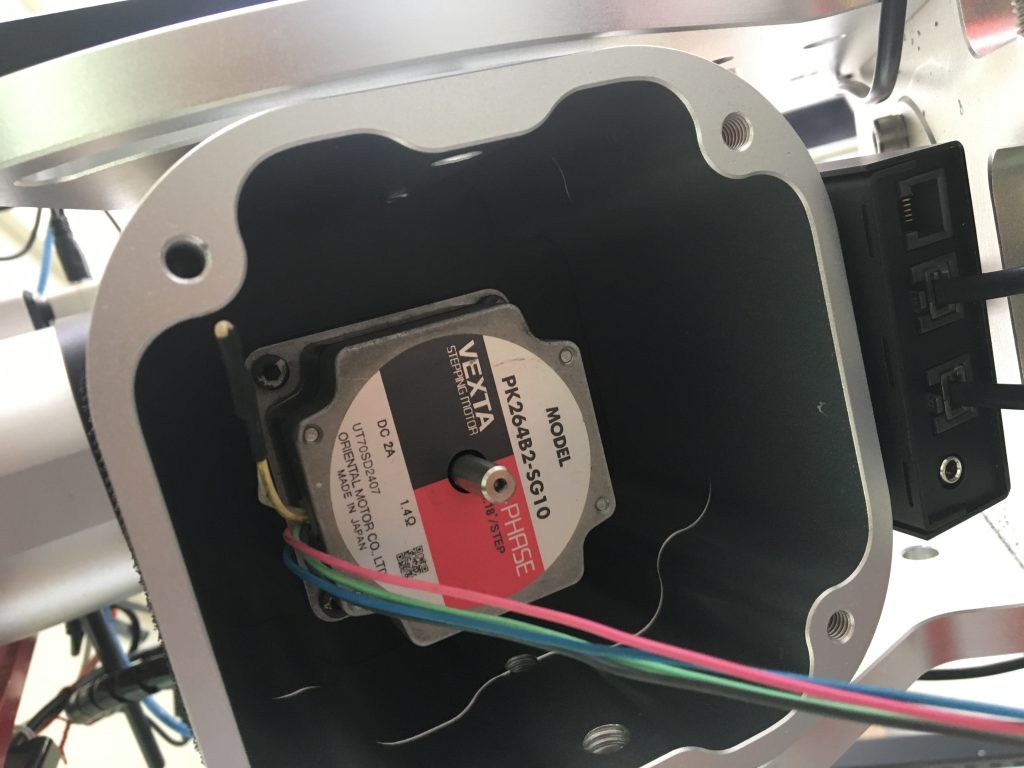
모터는일본산 VEXTA 제품으로 2상 바이폴라 스테핑 모터에 유성감속기가 1/10 붙어 있는 모델이다.
결국 모터의 유성감속기까지 포함하면 최종 감속비는 적경축 : 1/810, 적위축 : 1/510 이 되었다. 여기에서 10배씩 추가된 이유는 SHD 타입의 경우 감속비에 (+1)을 해 주어야 하기 때문이다.
이런 중요한 정보를 알려주신 분은 바로 하모닉 드라이브로 처음 적도의를 제작하신 최*용 님이시다. 혹시 유니트 타입을 사용하시는 분은 참고하시길…
또한 모터의 허용 전류값은 모터의 힘과 관계가 된다. 작은 모터는 허용 전류가 1A인 모델이 많이 있는데, 나는 제작자께서 2A 모터를 붙여 주셨다. 나중에 알았지만 이것은 신의 한 수 였던것 같다.


하모닉 적도의의 장점은 여러가지가 있는데, 몇가지 적어보면
1. 백레쉬가 없다.
2. 무게추 없이도 구동이 가능하다.
3. 탑제 중량에 비해 작고 가볍게 만들수 있다.
등이 장점이다.
하지만 무게 밸런스가 맞지 않은 상태에서 스텝모터에 전원이 공급되지 않으면 적도의가 무게에 의해 돌아가는 사고가 날 수 있다. 따라서 고정용이라면 무게추를 다는 것이 더 안전하고 에러를 줄일 수 있다.
처음에는 다카하시 무게추 두개 정도를 달아서 밸런스 불균형을 조금 줄여 주었다.
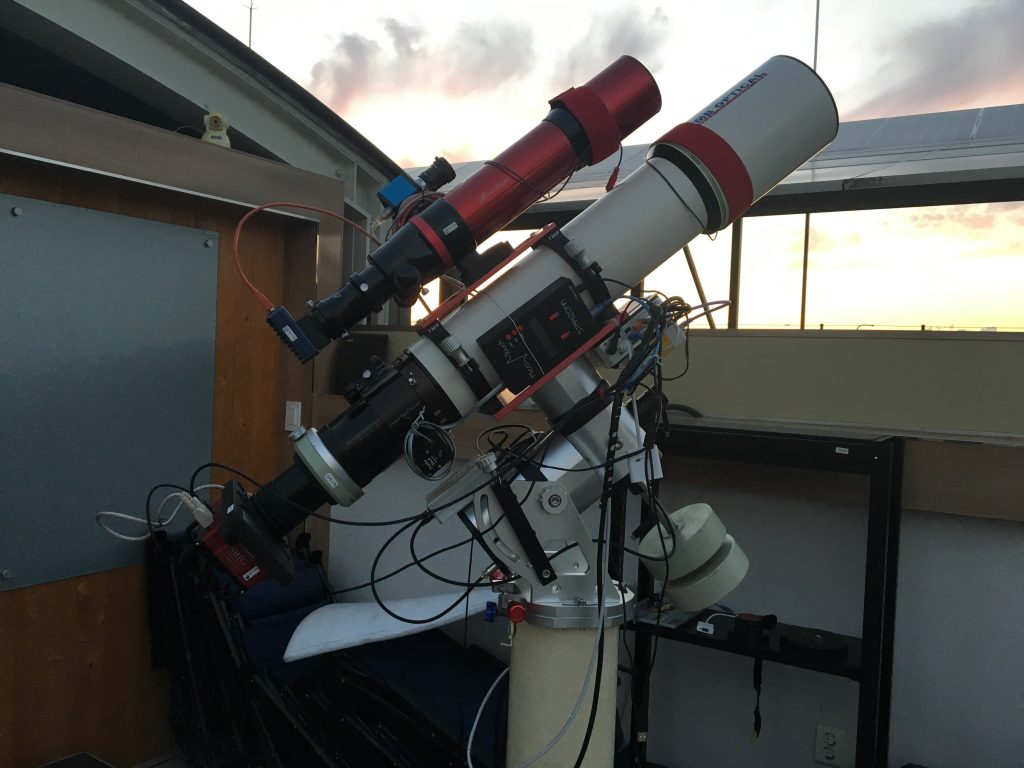
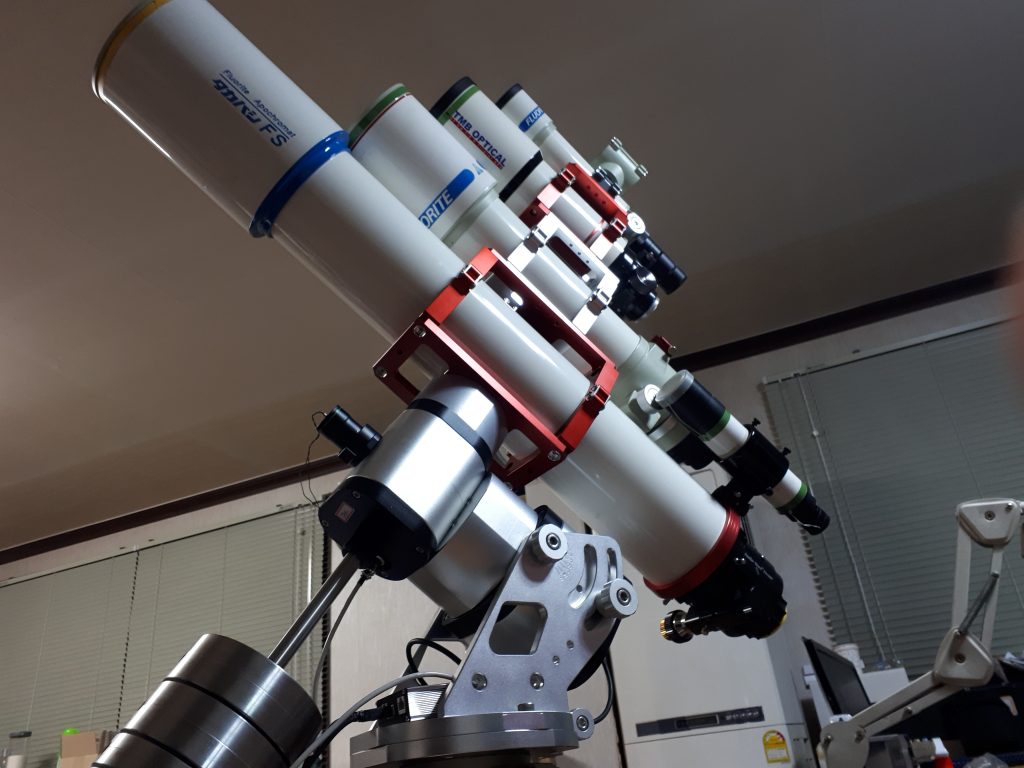
제작자께서 하모닉 적도의 성능을 테스트 하기 위해 굴절망원경을 4대나 장착한 모습이다.
나의 적도의도 5인치 굴절망원경 두대 정도는 쉽게 구동할 수 있는 정도의 성능을 보여주었다.

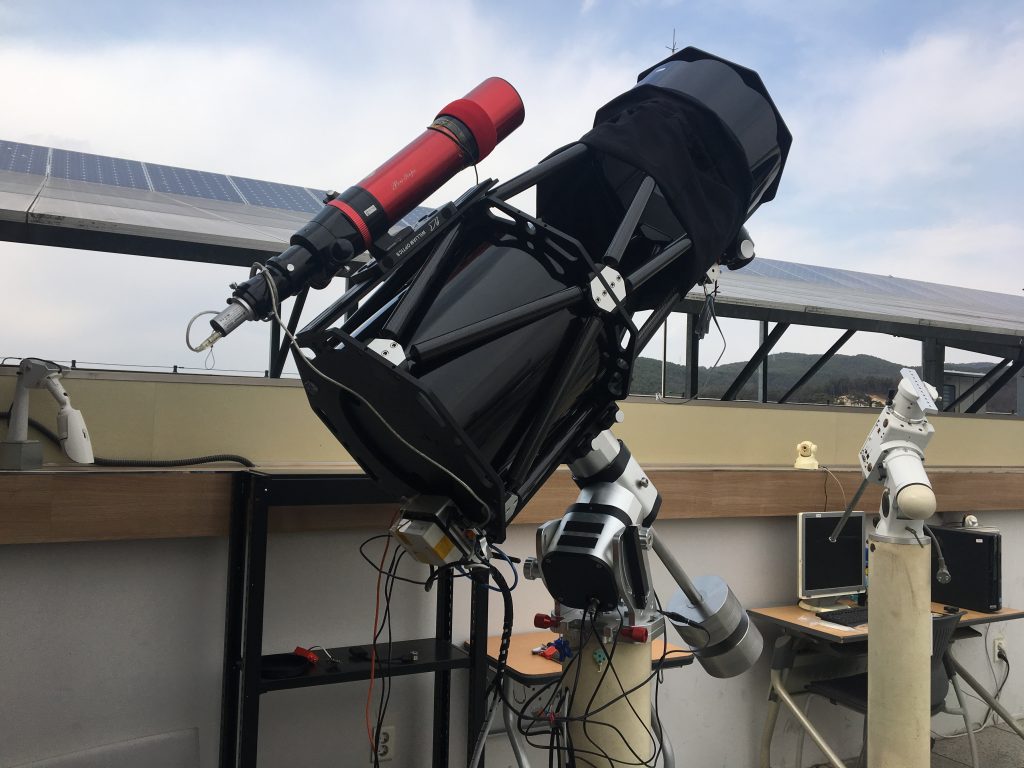
결국 더 큰 망원경인 GS optic의 12 inch Truss Newtonian을 구입하였다.
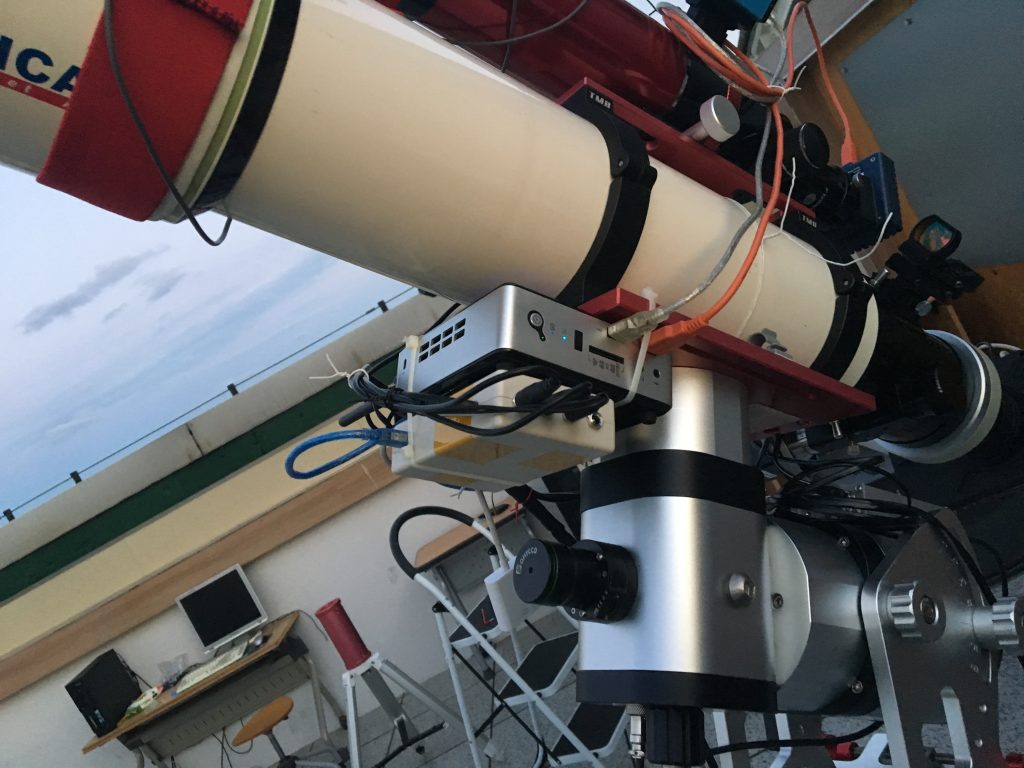
망원경 구동용 컴퓨터는 Zotak Mini PC를 경통 뒷부분에 붙였고,
스테인레스로 무게추를 붙여서 적도의가 완성되었다.


이 적도의 구동은 AstroEQ 적도의 컨트롤러를 이용한다. 현제 스텝모터를 구동할 수 있는 망원경 컨트롤러가 몇종류가 있는데, 저렴하게 이용할 수 있는 것이 바로 AstroEQ 이다. 자세한 정보는 아래 사이트에 있다.
https://www.astroeq.co.uk/tutorials.php
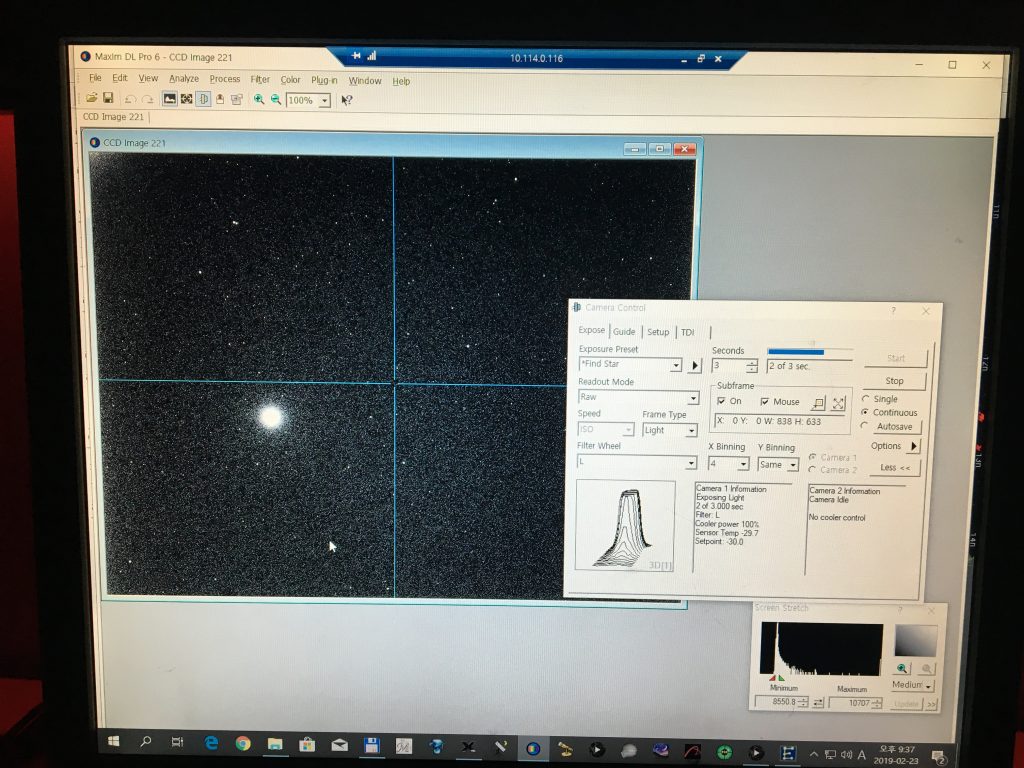
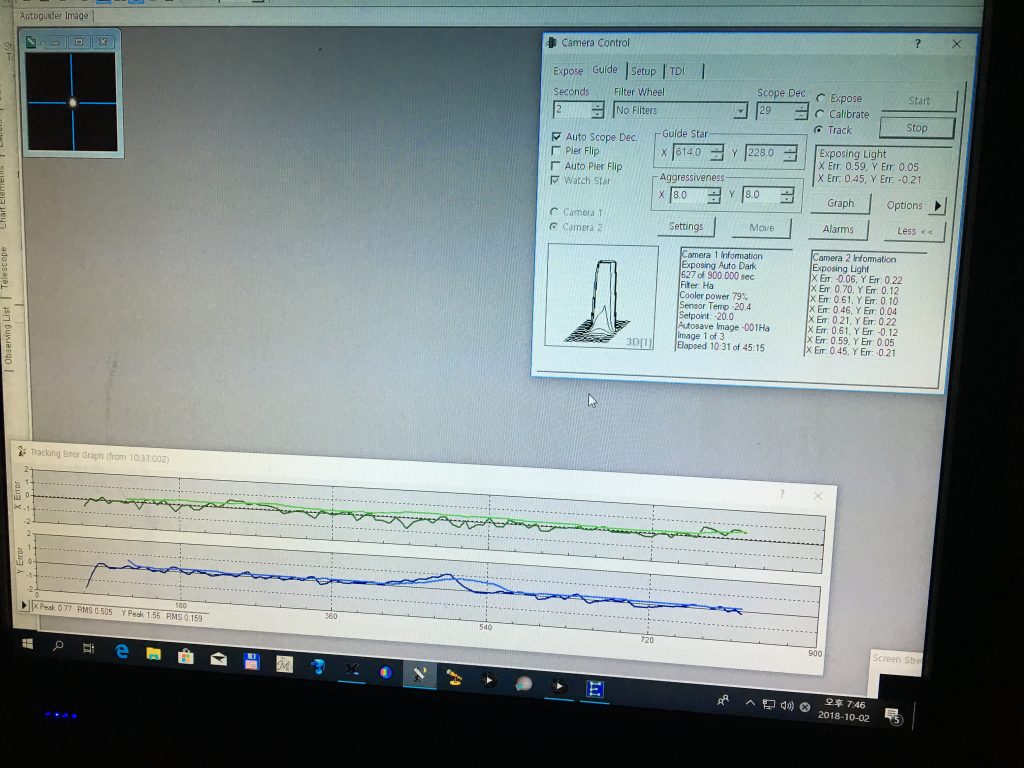
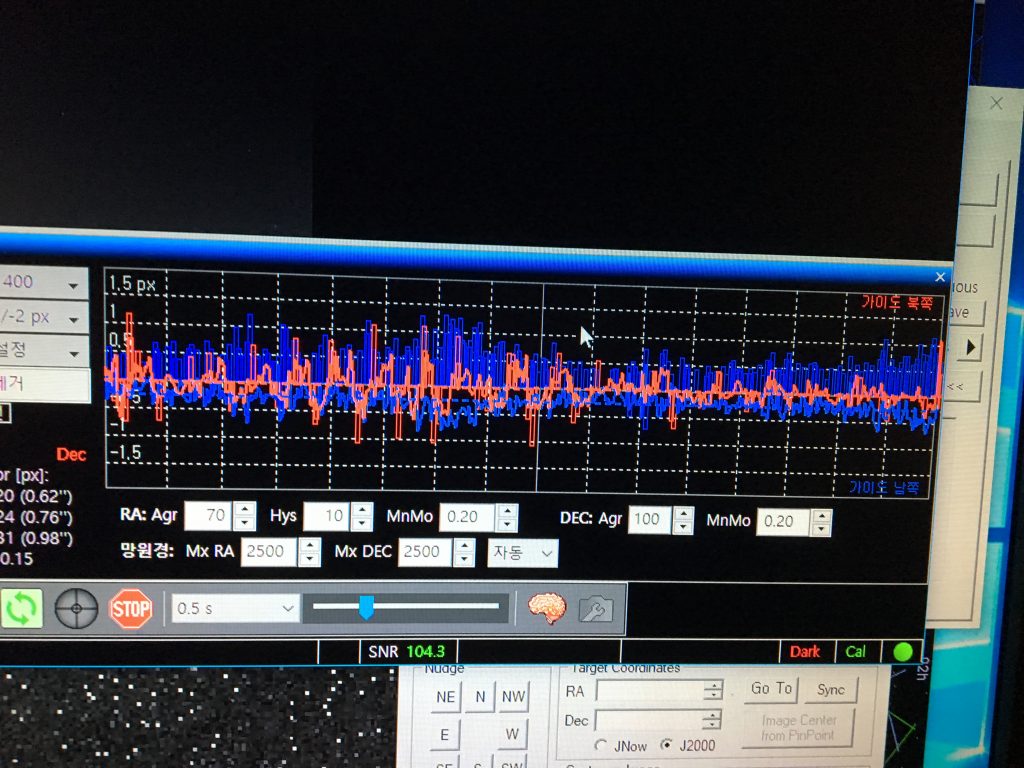
아래 사진들은 적도의 성능을 보여주는 사진들이다. 도입 정밀도, 가이드 정밀도 모두 우수하다.
하모닉 적도의를 만들려고 하는 사람들에게 도움이 되었으면 하는 마음에서 시간내서 정리를 해 보았다.
망원경 컨트롤러 AstroEQ에 대해서는 따로 정리를 할 예정이다.